MFULULIZO WA MICHEZO YA HARAKA – QCA-25 Kifaa cha Kubadilisha Haraka Mwishoni mwa Roboti



Jamii Kuu
Kibadilishaji cha Zana ya Roboti / Kibadilishaji cha Zana ya Mwisho wa Mkono (EOAT) / Mfumo wa Mabadiliko ya Haraka / Kibadilishaji cha Zana Kiotomatiki / Kiolesura cha Zana ya Roboti / Upande wa Roboti / Upande wa Gripper / Unyumbufu wa Zana / Utoaji wa Haraka / Kibadilishaji cha Zana ya Nyumatiki / Kibadilishaji cha Zana ya Umeme / Kibadilishaji cha Zana ya Hydraulic / Kibadilishaji cha Zana ya Usahihi / Utaratibu wa Kufunga Usalama / Kitendaji cha Mwisho / Kiotomatiki / Ufanisi wa Kubadilisha Zana / Ubadilishaji wa Zana / Otomatiki wa Viwanda / Zana ya Mwisho wa Mkono ya Roboti / Ubunifu wa Moduli
Maombi
Vifaa vya Mwisho wa Mkono (EOAT) hutumika sana katika viwanda kama vile utengenezaji wa magari, vifaa vya elektroniki vya 3C, vifaa vya usafirishaji, ukingo wa sindano, ufungashaji wa chakula na dawa, na usindikaji wa chuma. Kazi zake kuu ni pamoja na utunzaji wa vipande vya kazi, kulehemu, kunyunyizia dawa, ukaguzi, na kubadilisha haraka vifaa. EOAT huongeza kwa kiasi kikubwa ufanisi wa uzalishaji, kunyumbulika, na ubora wa bidhaa, na kuifanya kuwa sehemu muhimu ya otomatiki ya kisasa ya viwanda.
Kipengele
Usahihi wa hali ya juu
Upande wa kishikio cha kurekebisha pistoni una jukumu la kuweka nafasi, ambayo hutoa usahihi wa juu wa kuweka nafasi mara kwa mara. Vipimo milioni moja vya mzunguko vinaonyesha kuwa usahihi halisi ni wa juu zaidi kuliko thamani iliyopendekezwa.
Nguvu ya juu
Pistoni ya kufunga yenye kipenyo kikubwa cha silinda ina nguvu kubwa ya kufunga, kifaa cha roboti cha SCIC chenye kasi ya kufunga kina uwezo mkubwa wa kuzuia torque. Wakati wa kufunga, hakutakuwa na kutikisika kutokana na mwendo wa kasi ya juu, hivyo kuepuka kushindwa kufunga na kuhakikisha usahihi wa kuweka nafasi mara kwa mara.
Utendaji wa hali ya juu
Utaratibu wa kufunga wenye muundo wa uso wenye umbo la koni nyingi, vipengele vya kuziba vinavyodumu kwa muda mrefu na kipima mguso cha ubora wa juu hutumika ili kuhakikisha mguso wa karibu wa moduli ya ishara.



Kigezo cha Vipimo
| Mfululizo wa Vibadilishaji Haraka | ||||
| Mfano | Mzigo wa juu zaidi | Njia ya gesi | Nguvu ya Kufunga @ 80Psi (Bar 5.5) | Uzito wa bidhaa |
| QCA-05 | Kilo 5 | 6-M5 | 620N | Kilo 0.4 |
| QCA-05 | Kilo 5 | 6-M5 | 620N | Kilo 0.3 |
| QCA-15 | Kilo 15 | 6-M5 | 1150N | Kilo 0.3 |
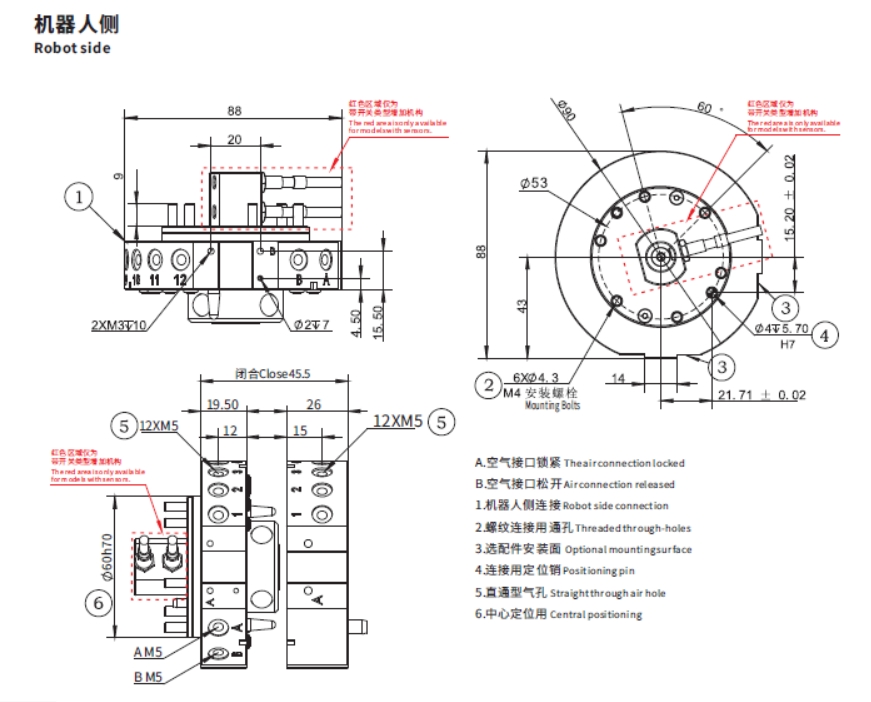
| QCA-25 | Kilo 25 | 12-M5 | 2400N | Kilo 1.0 |
| QCA-35 | Kilo 35 | 8-G1/8 | 2900N | Kilo 1.4 |
| QCA-50 | Kilo 50 | 9-G1/8 | 4600N | Kilo 1.7 |
| QCA-S50 | Kilo 50 | 8-G1/8 | 5650N | Kilo 1.9 |
| QCA-100 | Kilo 100 | 7-G3/8 | 12000N | Kilo 5.2 |
| QCA-S100 | Kilo 100 | 5-G3/8 | 12000N | Kilo 3.7 |
| QCA-S150 | Kilo 150 | 8-G3/8 | 12000N | Kilo 6.2 |
| QCA-200 | Kilo 300 | 12-G3/8 | 16000N | Kilo 9.0 |
| QCA-200D1 | Kilo 300 | 8-G3/8 | 16000N | Kilo 9.0 |
| QCA-S350 | Kilo 350 | / | 31000N | Kilo 9.4 |
| QCA-S500 | Kilo 500 | / | 37800N | Kilo 23.4 |

Upande wa roboti

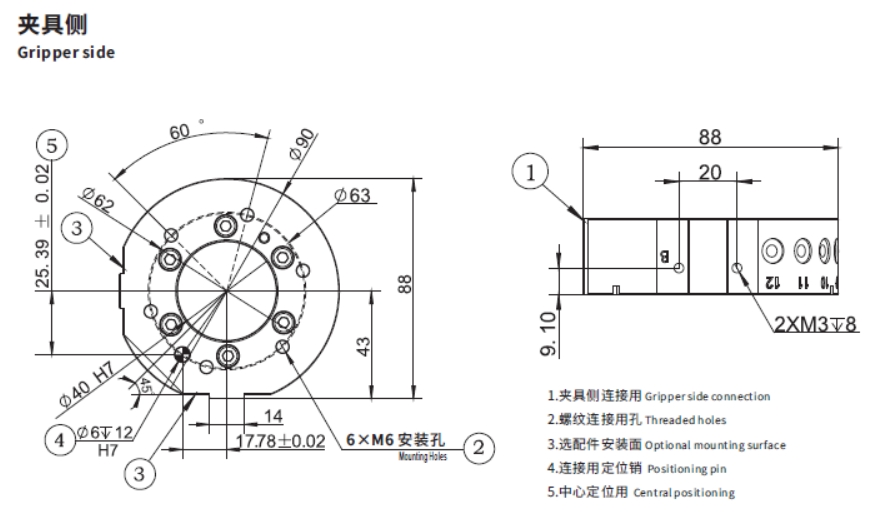
Upande wa kushikilia

Swichi ya kamba ya pembeni ya roboti
Moduli Inayotumika
Aina ya Moduli
| Jina la Bidhaa | Mfano | PN | Volti ya Kufanya Kazi | Kazi ya Sasa | Kiunganishi | Kiunganishi cha PN |
| Moduli ya ishara ya upande wa roboti | QCSM-15R1 | 7.Y00965 | 24V | 2.5A | DB15R1-1000① | 1.Y10163 |
| Moduli ya ishara ya upande wa kishikio | QCSM-15G1 | 7.Y00966 | 24V | 2.5A | DB15G1-1000① | 1.Y10437 |
①Urefu wa kebo ni mita 1
Mstari wa Kunyooka wa Moduli ya HF
| Jina la Bidhaa | Mfano | PN |
| Moduli ya masafa ya juu ya upande wa roboti | QCHFM-02R-1000 | 7.Y02086 |
| Moduli ya masafa ya juu ya upande wa gripper | QCHFM-02G-1000 | 7.Y02087 |
Mstari wa Kunyooka wa Moduli ya Umeme yenye Misingi 15
| Jina la Bidhaa | Mfano | PN |
| Moduli ya umeme ya upande wa roboti yenye mihimili 15 | QCHFM-15R1-1000 | 7.Y02097 |
| Moduli ya umeme ya upande wa gripper yenye mihimili 15 | QCHFM-15G1-1000 | 7.Y02098 |
Mstari wa Kunyooka wa Moduli ya Nguvu
| Jina la Bidhaa | Mfano | PN |
| Moduli ya masafa ya juu ya upande wa roboti | QCSM-08R-1000 | 7.Y02084 |
| Moduli ya masafa ya juu ya upande wa gripper | QCSM-08G-1000 | 7.Y02085 |
Kiolesura cha Kebo ya Mtandao cha RJ45S
| Jina la Bidhaa | Mfano | PN |
| Moduli ya servo ya RJ455 upande wa roboti | QCSM-RJ45*5M-06R | 7.Y02129 |
| Moduli ya servo ya RJ455 ya upande wa gripper | QCSM-RJ45*5M-06G | 7.Y02129 |
Biashara Yetu


Aina za bidhaa
-

Mfululizo wa RGI wa Robotiki za DH Servo Electric Gripper –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

Mfululizo wa Mabadiliko ya Haraka - QCA-100 A Quick Ch ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

Mfululizo wa Kifaa cha Kuchomea Umeme cha Robotiki cha DH –...
-

MFULULIZO WA MODULI YA KIGANI – FPT Vidole vitatu...