Mfululizo wa Vishikio vya Umeme vya Hitbot – Kishikio cha Umeme cha Z-EFG-C50




Jamii Kuu
Mkono wa roboti wa viwandani / Mkono wa roboti shirikishi / Kishikilia umeme/Kiendeshaji chenye akili/Suluhisho za otomatiki
Maombi
Vishikio vya roboti vya mfululizo wa SCIC Z-EFG ni vidogo vyenye mfumo wa servo uliojengewa ndani, ambao hurahisisha kufikia udhibiti sahihi wa kasi, nafasi, na nguvu ya kubana. Mfumo wa kisasa wa kubana wa SCIC kwa suluhisho za kiotomatiki utakuruhusu kufungua uwezekano mpya wa kufanya kazi kiotomatiki ambazo hukuwahi kufikiria zinawezekana.

Kipengele

·Kugundua matone ya gripper, kazi ya kutoa eneo
· Nguvu, nafasi na kasi vinaweza kudhibitiwa kwa usahihi kupitia Modbus
·Maisha marefu: makumi ya mamilioni ya mizunguko, ikizidi makucha ya hewa
· Kidhibiti kilichojengwa ndani: alama ndogo ya nyayo, ujumuishaji rahisi
·Hali ya udhibiti: 485 (Modbus RTU), I/O
Kiharusi cha mm 50, Nguvu ya Kufunga 140N, Inaendana na Mkono wa Roboti wa mhimili 6.
Masafa ya Juu
Muda mfupi zaidi wa kupiga ni sekunde 0.5
Usahihi wa Juu
Uwezo wa kurudia ni ± 0.03mm
Mzigo Mkubwa
Uzito wa kubana unaopendekezwa ≤2kg
Chomeka na Cheza
Kifaa cha kushikilia umeme mahsusi kwa mkono wa roboti wenye mhimili 6
Mkia Unaoweza Kubadilishwa
Mkia wake unaweza kubadilishwa, unafaa kwa maombi mbalimbali
Nguvu Laini ya Kubana
Inaweza kubana vitu dhaifu na vilivyoharibika

● Kukuza mapinduzi katika uingizwaji wa vishikio vya nyumatiki na vishikio vya umeme, kishikio cha kwanza cha umeme chenye mfumo jumuishi wa servo nchini China.
● Uingizwaji kamili wa compressor ya hewa + kichujio + vali ya solenoid + vali ya kaba + kishikio cha nyumatiki
● Muda wa huduma ya mizunguko mingi, unaolingana na silinda ya kitamaduni ya Kijapani



Kigezo cha Vipimo
| Nambari ya Mfano Z-EFG-C50 | Vigezo |
| Jumla ya kiharusi | 50mm inayoweza kurekebishwa |
| Nguvu ya kushika | 40-140N inayoweza kubadilishwa |
| Kurudia | ± 0.03mm |
| Uzito unaopendekezwa wa kushikilia | ≤2kg |
| Hali ya upitishaji | Raki ya gia + Mwongozo wa duara |
| Ujazaji wa mafuta ya vipengele vinavyosogea | Kila baada ya miezi sita au mienendo/wakati milioni 1 |
| Muda wa mwendo wa kiharusi cha njia moja | Sekunde 0.5 |
| Hali ya mwendo | Vidole viwili husogea mlalo |
| Uzito | Kilo 1 |
| Vipimo(L*W*H) | 72*72*143mm |
| Volti ya uendeshaji | 24V±10% |
| Imekadiriwa mkondo | 0.8A |
| Mkondo wa kilele | 2A |
| Nguvu | 20W |
| Darasa la ulinzi | IP20 |
| Aina ya mota | DC isiyotumia brashi |
| Kiwango cha halijoto ya uendeshaji | 5-55℃ |
| Kiwango cha unyevu kinachofanya kazi | RH35-80 (Hakuna baridi kali) |

| Mzigo tuli unaoruhusiwa katika mwelekeo wima | |
| Fz: | 300N |
| Torque inayoruhusiwa | |
| Mx: | Nm 7 |
| Yangu: | Nm 7 |
| Mz: | Nm 7 |
Uendeshaji na Kidhibiti Jumuishi
Kishikio cha umeme cha Z-EFG-C50 kina mfumo jumuishi wa servo ndani, jumla ya kiharusi chake ni 50mm, nguvu ya kubana ni 40-140N, nguvu yake ya kubana na kubana inaweza kurekebishwa, na uwezo wake wa kurudia ni ±0.03mm.

Inapatana na Mkono wa Roboti wa Mhimili Sita

Kishikio cha umeme kinaweza kuendana na mkono wa roboti wa mhimili 6, ili kufikia plagi na ucheze, muda wake mfupi zaidi wa kuhamisha ni sekunde 0.5 tu, ambao unaweza kukidhi maombi ya kubana kwa laini thabiti ya uzalishaji.
Saizi Ndogo, Inaweza Kubadilika Kusakinishwa

Z-EFG-C50 inatumia mfumo wa upitishaji wa rafu ya gia + reli ya mwongozo wa mpira, ukubwa wa bidhaa ni L72*W72*H143mm, inaweza kunyumbulika kupanga katika hali ya eneo dogo.


Mwitikio wa Haraka, Usahihi wa Udhibiti wa Nguvu

Muda mfupi zaidi wa kupiga mara moja ni sekunde 0.5 tu, inaweza kushughulikia kazi ya kubana haraka, sehemu zake za mkia zinaweza kubadilishwa wakati wowote, wateja wanaweza kurekebisha mikia kulingana na mahitaji.
Njia za Kudhibiti Zidisha, Rahisi Kuzitumia

Usanidi wa Z-EFG-C50 ni rahisi, una aina nyingi za udhibiti, ikiwa ni pamoja na 485 (Modbus RTU), Pulse, I/O, na inaoana na mfumo mkuu wa udhibiti wa PLC.

Kituo cha Mzigo cha Kukabiliana na Mvuto
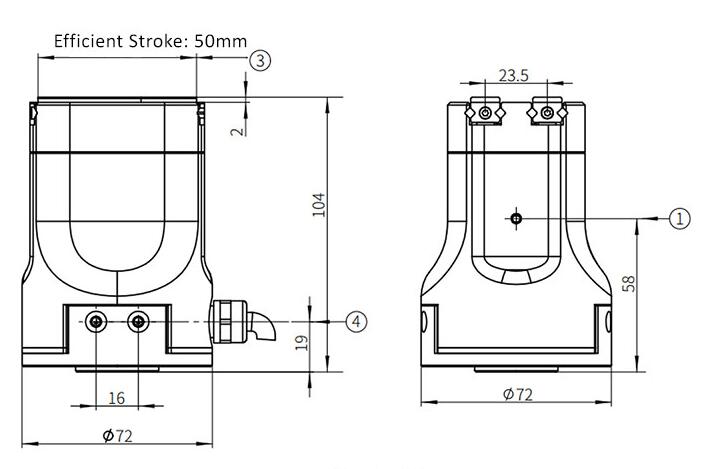
1. Kiashiria cha LED
2. Eneo la Ufungaji, tumia Skurubu 4 za M4
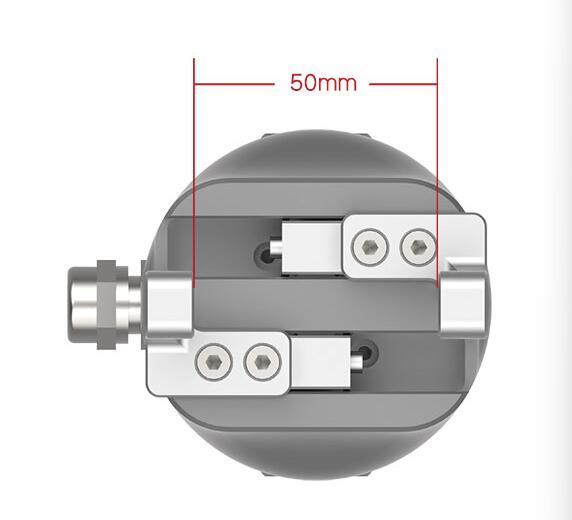
3. Kiharusi cha gripper ya umeme ni 50mm
4. Soko la Karanga
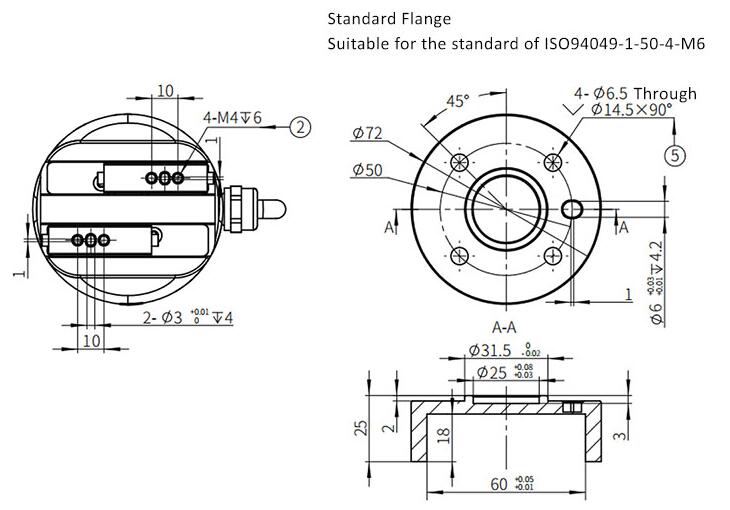
5. Eneo la usakinishaji, tumia skrubu 4 za M6 ili kuunganisha na flange ya mwisho ya mkono wa roboti shirikishi
Biashara Yetu


Aina za bidhaa
-

Mfululizo wa RGI wa Robotiki za DH Servo Electric Gripper –...
-

Mfululizo wa CG wa Robotiki za DH Servo Electric Gripper – ...
-

Mfululizo wa RGI wa Robotiki za DH Servo Electric Gripper –...
-

Mfululizo wa PGC wa Kifaa cha Kuchomea Umeme cha DH Robotics Servo –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-12 Paral...